|
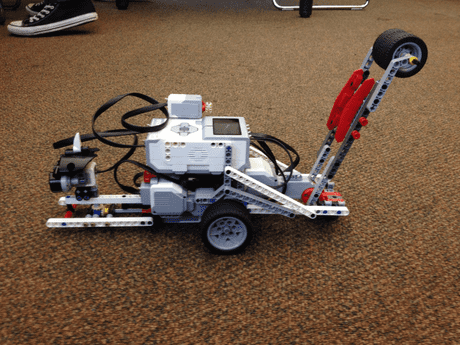
MC HAMMA-SLAMMA was intended to destroy everything in it's path. It is equipped with an ultrasonic sensor and a huge hammer. The starting idea was to have the body stationary and make it pivot to smash things. The model on the left proved to be much more flexible and easy to work with.
I grew in knowledge and thinking by learning about new coding techniques to make my robot more efficient. The main accomplishment through this robot is the usage of multithreading while coding. Multithreading is a coding technique that allows your robot to run multiple tasks at once. This allowed us to run multiple tasks at the same time. The main function of the robot is to seek out an object using the distance sensor and then roll up to it and smash it. I grew in oral communication because I needed to present my robot in an ignite format. Ignite presentations consist of 20 slides, each 15 seconds long. I still need to get used to this format because it can be difficult to fit information into such a small time frame. The link to the presentation is to the left. |
